Biomedical Engineering Program, University Colombian School of Engineering, Julio Garavito, Bogota, Colombia.
Laura Mayorga
Email: laura.mayorga@mail.escuelaing.edu.co
Received : Jan 16, 2024 Accepted : Feb 14, 2024 Published : Feb 21, 2024 Archived : www.meddiscoveries.org
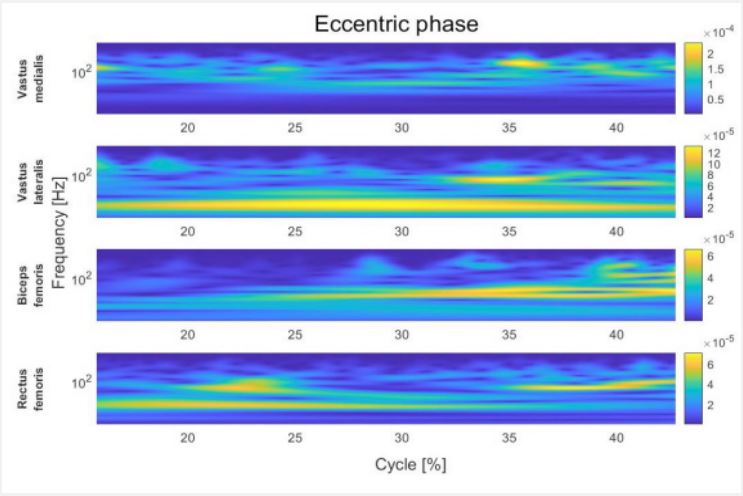
One of the main objectives of sports biomechanics is the improvement of sports performance. The Drop Jump (DJ) is a vertical jump that seeks to evaluate reactive strength capacity, which can also be expressed as the ability to perform the muscle Stretch Shortening Cycle (SSC) quickly [1]. Thus, the interest in studying the EMG signals of some of the main muscles of the lower extremity was born. Different methods of surface Electromyography (sEMG) signal processing have been studied, some of them are focused on amplitude analysis. Nevertheless, this kind of methodology does not provide information about the frequency content of the signal. Therefore, analysis methods focused on spectral analysis has been introduced, for instance the Continuous Wavelet Transform (CWT) [4]. Considering the foregoing, the aim in the present pilot study is the application of CWT as a methodology for sEMG signals processing of high-performance athletes during the contact phase of DJ maneuver. First and foremost, the instants that define the contact phase were identified. Then, the processing of sEMG signals was carried out using the CWT with the Morlet wavelet as mother wavelet. Finally, the scalograms were segmented using Otsu’s method and followed of a post-processing stage to obtain information of the frequency content of the signals. From this methodology, information is obtained on the kinematic behavior of the Center of Mass (CoM) and the knee joint during the contact phase, as well as the muscular behavior in the time and frequency domains. In summary, it is possible to appreciate the benefits of the CWT as a processing methodology for sEMG signals. Also, this methodology has allowed a better understanding of the muscle activity and the kinematic variables during the contact phase of the Drop Jump maneuver. Nevertheless, observing the total contact phase makes it difficult to appreciate details in the muscle activity during the eccentric phase.
Keywords: Biomechanics; CWT; Drop Jump; sEMG.
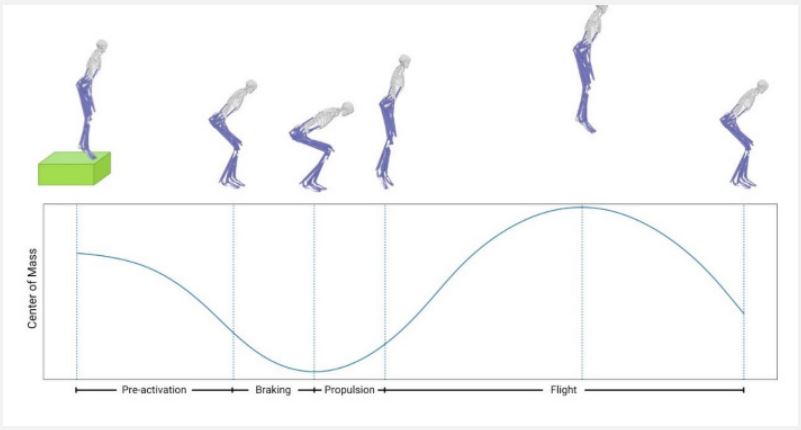
Plyometric exercises are known as those that include the execution of the SSC; within this group, DJ is one of the most common maneuvers and it is considered important in the improving of the performance in vertical hops [1,2]. During the DJ, the athlete is instructed to drop from a specified height and immediately vertically jump as high as possible. The time comprising the ground contact determines the contact phase, which in turn is divided into eccentric and concentric phases, characterized by eccentric and concentric muscle contractions, respectively. The contact phase is considered relevant in the definition of Jump Height (JH) and power, and which study may provide a better understanding of the events related to these parameters. Additionally, this time has been used in the determination of the Reactive Strength Index (RSI), a measure used for the estimation of the capacity to perform the SSC quickly; however, there is not knowledge about its biomechanical determinants [1,3].
In view of the foregoing, information obtained from motion capture systems and EMG signal acquisition systems is considered useful to clarify the exposed problem by means of the description and quantification of kinematic variables and muscular action. In this way, it is important to define an appropriate methodology that allows to obtain relevant information. Particularly, for EMG signals spectral techniques have been studied to provide information in the time-frequency domain. The CWT is a mathematical tool that offers multiresolution analysis in the time and frequency domains and introduces the concept of scale (a), a parameter that controls the stretching or contraction of a mother wavelet, that merely consists of an oscillatory function with pass band characteristics. Each of the resulting variations from the effect of the scale parameter on the mother wavelet is part of a family 3 of wavelets, and each one is convolutioned with the sEMG signal [4]. From this mathematical operation, we obtain a coefficient that indicates how well the wavelet and the signal match in the instant (b). The absolute value of every coefficient is observed in the scalogram, a visual representation of the energy distribution of the signal as a heat map [5]. SEMG analysis in the time and frequency domains using the CWT allows a deeper comprehension of the electrophysiological processes behind the muscle activation. Thus, the deduction of the fiber types involved and even the number of recruited motor neurons involved in a specific motor task are allowed [6,7]. Also, this tool is used to obtain information, in the frequency domain, to study the fatigue processes during the physical activity [8], as well as for the identification of muscle patterns. For instance, in [9] used the CWT to obtain the muscle patterns from sEMG signals from subjects with history of Anterior Cruciate Ligament Reconstruction (ACLR) and healthy control subjects during a hop test, and then used the scalograms as input of a machine learning algorithm to identify differences between the groups. A similar study is presented in [10], where the intensity patterns of muscle activation are obtained to identify the spectral properties during the gait cycle in subject with diabetic neuropathy. Therefore, the aim of this pilot study is to apply the CWT as a methodology for the processing of sEMG signals obtained from high-performance athletes to characterize the DJ by means of the distribution of the energy density in the time and frequency domains. In addition, it is desirable to establish a correlation between the results obtained with the application of the CWT and the knee kinematics. In this paper, we present the case study report with the methodology used for the analysis of sEMG signals, as well as the discussion of the results obtained by applying the CWT and the biomechanical variables analyzed during the contact phase of the DJ. Finally, the conclusions and recommendations of the pilot study are presented.
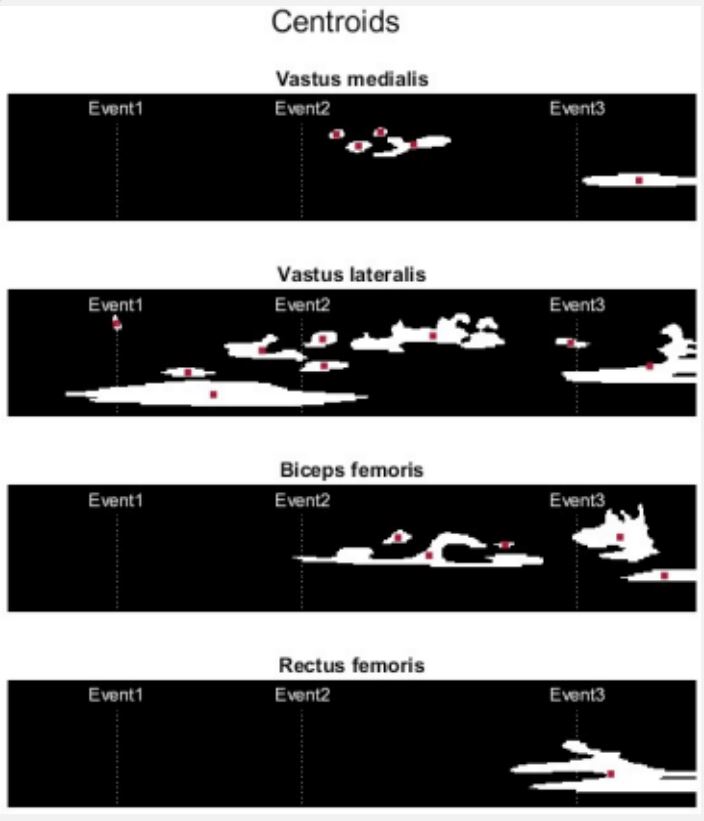
From the Gibiome research group of the University Colombian School of Engineering Julio Garavito and the University of the Rosary comes the interest to explore the biomechanical variables that constitute an ACL injury risk factor. Therefore, it is proposed the evaluation of these variables in a set of vertical hop tests performed by a group of high-performance athletes with and without ACL injury history. As part of the project, it is necessary to define a methodology to the data processing of each jump according with their purpose of performance. In this case, it is defining the methodology for the data processing of the DJ taking advantage of the benefits and potential offered by the CWT to analyze the characteristics of the contact phase. An 18-year-old male with a body mass of 65.8 kg, a height of 170 cm, and a body mass index of 22.7 kg/m2 , high-performance soccer player was selected for this pilot study because of the absence of a history of injury in his lower limbs, specifically those related to Anterior Cruciate Ligament (ACL) injury. During the test, the man was indicated to execute the DJ from a height of 31 cm three times and was instrumented with thirty reflected markers according to the Plug-in Gait protocol modified for Skin Cluster and with seven non-invasive wireless sensors for the acquisition of sEMG signals following SENIAM standards; however, in this pilot study, we only take the information from the dominant limb, corresponding to information from the Vastus Medialis (VM), Vastus Lateralis (VL), Biceps Femoris (BF), and Rectus Femoris (RF) muscles. The Vicon system with eight optoelectronic cameras with a sampling frequency of 100Hz was used for motion capture data acquisition, while the Trigno Wireless Biofeedback System from Delsys Company with a sampling frequency of 2000Hz was used for sEMG signal data acquisition. In the methodology, the first step was the identification of the instants that define the contact phase or interest data window. They correspond to the instant of the first touchdown (event 1) and the instant of the take-off (event 3). Between them, it was also identified the instant of CoM velocity zero (event 2), that divides the eccentric and concentric phases of the SSC, also called braking and propulsive phases, respectively. Then, a literature review was carried out to define an appropriate mother wavelet to the processing stage. According to references [6,11,12] the Morlet wavelet is suitable to identify quick variations in the signal. Once the mother wavelet was defined, the CWT was applied to twelve signals corresponding to four muscles for each attempt that were normalized to 401 points. Then, the resulting scalograms from each muscle in the three attempts were averaged, obtaining four resulting scalograms. Finally, the scalograms were segmented using Otsu’s method, which allows for the identification of areas of maximum energy location, for which centroids were calculated. From the vertical location of these centroids, the principal frequency component of the main areas of maximum energy was defined. Also, the frequency ranges and durations of these areas were characterized from the segmented images using the impixelinfo function available in MATLAB. On the other hand, the vertical displacement of the Center of Mass (CoM), its vertical component of its velocity, the angle of the knee in the sagittal plane, and the angular velocity were estimated to analyze and correlate the CWT results.
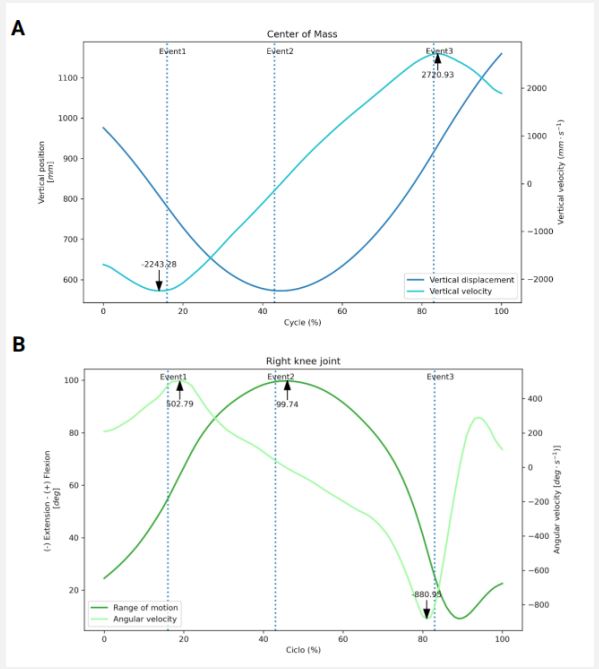
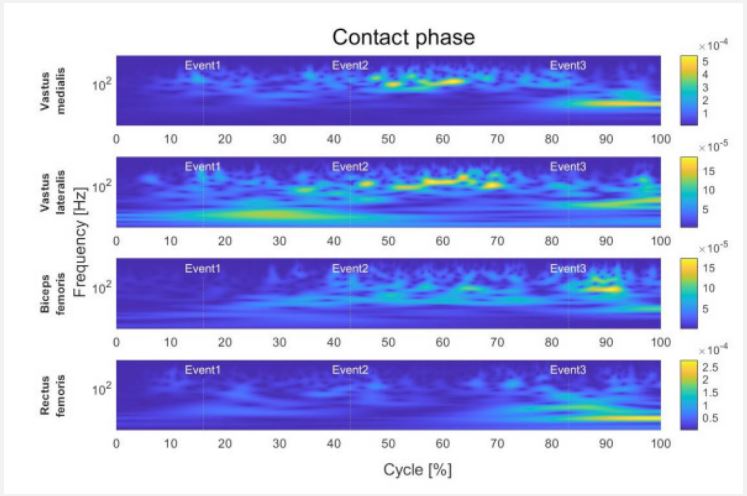
According to the kinematic behavior of the CoM (Figure 2A), events 1 and 2 coincide with maximum velocity magnitudes. Regarding to the knee joint (Figure 2B), the eccentric phase is characterized by an increase in the angle of flexion reaching 99.74° and a decrease in the angular velocity, which favors the absorption of kinetic energy in the muscle-tendon unit and the stabilization for change of direction in the maneuver. In Figure 3 is observed that this movement involves the BF and, to a lesser extent, the VM and VL. By comparison, the concentric phase is characterized by a knee extension and an increase in velocity magnitude. This behavior is attributed to the utilization of stored energy for the generation of explosive force [13]. In the VM, two of the main frequency components of the maximum energy locations are higher than 150Hz, while the remaining two are lower than 100Hz, but in no case are they far from these values. Furthermore, the extreme values of the activation ranges correspond to 65,103Hz and 197,357Hz. In the VL, specifically in the braking phase, the frequency components do not exceed 70Hz and the frequency ranges span from 7.085Hz to 121.487Hz, highlighting that the first two high energy locations do not exceed 33Hz. On the other hand, the maximum frequency components during the propulsion phase mostly exceed 90Hz, except for the second maximum location in this phase, which main frequency component corresponds to approximately 35Hz. Regarding the frequency ranges in the propulsion phase, the minimum frequency range is 30.372Hz and the maximum is 279.104Hz. Finally, for the BF, there are three areas of maximum energy localization in the propulsion phase, where the maximum energy components are below 93Hz and are separated from each other by about 20Hz. These areas span frequencies from 28.338Hz to 121.487Hz. This information suggests muscle activity in lower frequencies for the eccentric phase and activation of low-frequency motor units, mainly conformed by slow-twitch fibers, that have a slow response to stimulus and high resistance to fatigue. Conversely, the concentric phase suggests the activation of high-frequency motor units, mainly conformed by fast-twitch fibers, that respond quickly to stimulus and have a low resistance to fatigue [14,15]. Finally, it is important to mention that the muscle activity associated with the eccentric phase has lower energy.
In summary, the present investigation has clarified the benefits of using the CWT for the processing of sEMG signals by providing information about muscle activity in the time and frequency domains, in addition to providing a multiple-resolution analysis that decreases the loss of relevant information.
Additionally, the methodology employed has allowed a better understanding of muscle activity and the behavior of kinematic variables during the contact phase of the DJ maneuver. Specifically, it has facilitated the identification of the fast-twitch motor units as principal contributors in the concentric phase, whereas the slow-twitch motor units’ action has been identified as principal during the eccentric phase. Despite this, it was found that the evaluation of the entire contact phase made it difficult to identify muscular behavior during the eccentric phase due to the high energy present during the concentric phase. According to the kinematic behavior of the knee joint, the decrease in the angular velocity indicates a necessity of stabilization during the contact phase that is facilitated by the action of the quadriceps. However, with the obtained results is not possible yet to conclude about the relationship between the analyzed variables and the ACL injury risk. Therefore, would be beneficial to apply the defined methodology to the data of various healthy and ACL history subject to stablish the differences in the variables between groups and to explore the possibility of predicting the ACL injury risk from the information obtained. These results may contribute to the development of sports training and medical care that seek to enhance muscle activity and demonstrate a relationship with decreased risk of injury.
